アリババ、自動運転で技術的ブレークスルーが進展?3Dオブジェクト検出精度と速度の両立

3月19日、アリババの研究開発センターのダルマ院はこのほど、コンピュータビジョンサミット「CVPR 2020」に論文が入選したと発表した。アリババは今回の発表を通して、汎用性のある自動運転向け高性能オブジェクト検出器を提案し、業界で始めて3Dオブジェクト検出精度と速度の両立および自動運転システムの安全性能の向上を実現しているとアピールした。
通常の2D画像認識アルゴリズムとは異なり、自動運転システムは精度と速度の要求が高く、検出器は周囲の物体を迅速に認識するだけでなく、3次元空間における物体の位置を正確に特定する必要がある。しかし、現在主流の1段階検出器と2段階検出器はいずれも検出精度と速度のバランスが取れておらず、これは自動運転の安全性能を大きく制限している。
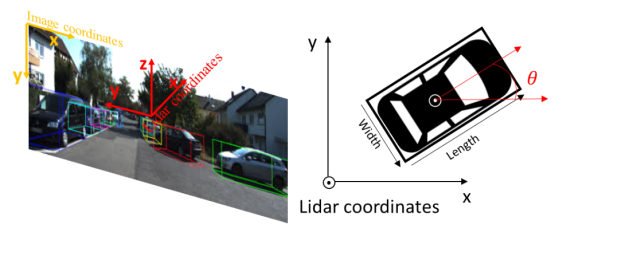
3Dオブジェクト検出は物体分類や3次元空間での縦横高さ、回転角などの情報を出力する必要がある
今回ダルマ院は、2段階検出器における特徴量を細粒度に表現する方法を1段階検出器に集積するという全く新しい考え方を提案した。具体的には、トレーニングにおいて1つのサブネットを用いて1段階検出器におけるボクセル特徴量を点群ベース特徴量に変換し、一定の教師信号を与えるとともに、モデル推論プロセスにおいてサブネットが計算に関与する必要がないため、速度を維持しながら検出精度を向上させている。
さらに、ダルマ院は、1段階検出器で発生しやすい予測されるバウンディングボックスの位置合わせの精度が信頼度と一致しない問題に対処するために、エンジニアリング上の改善点としてPart-sensitive Warping(PSWarp)を挙げている。
テストの結果によると、自動運転分野の権威あるデータセットKITTI BEVのランキングでは、この検出器のパフォーマンスが1位となり、他の1段階検出器を上回る精度と検出速度も現在の2位の倍以上の25FPSに達している。
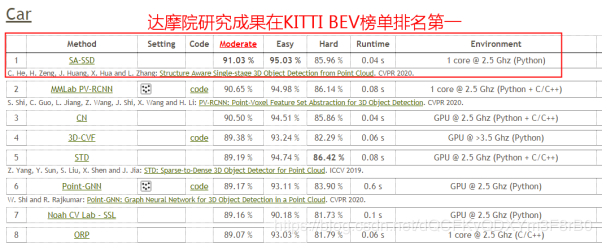
KITTI BEV ラインキング
アリババの研究チームは、オブジェクト検出器での技術的ブレークスルーは自動運転分野における重要な突破口であり、今回提案した検出器は1段階検出器と2段階検出器の優位性を融合しているため、3Dオブジェクト検出の精度と速度の向上を同時に実現し、今後自動運転産業の更に多くの難題を解決することができるとの見方を示した。
研究チームは、すべてアリババのダルマ院の出身で、ダルマ院の研究実習生Chenhang He氏を第一著者として、高級研究員でIEEE Fellowの華先勝氏と張磊氏などがメンバーとなっている。
BATの中で百度やテンセントと比べ、アリババは自動運転分野で控え目だった。2018年4月に自動運転への布石を発表して以降、大きな動静が出ていない。テクノロジーパラダイムではアリババは、L4クラスの自動運転にターゲットを絞り、技術的なネックとコスト課題を、「路車協調システム」で解決しようとしている。現在、AIラボのチーフ科学者である王剛氏が音頭をとっている。昨年9月のアリババ技術イベントの「雲栖大会」で、アリババグループの最高技術責任者(CTO)兼阿里雲智能総裁の張建鋒氏は、ダルマ院の自動運転はすでにL4クラスの水準に達していると明らかいにしたが、これ以上の情報を披露しなかった。
今回アリババの自動運転に関する対外的アナウンスメントは、アリババがこの分野で力を伸ばしていることを意味するのかもしれない。
参考記事:https://blog.csdn.net/dQCFKyQDXYm3F8rB0/article/details/104965960